热点资讯
其他资讯
宁波出售机电步进式BH180A-L2-70-B2-D1-S8低振动步进减速机
文章来源:ymcdkj
发布时间:2024-05-08 09:47:20
-D1-S8低振动步进减速机
直流电动机按结构及工作原理可分为无刷直流电动机和有刷直流电动机。有刷直流电动机可分为永磁直流电动机和电磁直流电动机。电磁直流电动机又分为串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。永磁直流电动机又分为稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。按起动与运行方式分类电动机按起动与运行方式可分为电容起动式电动机、电容盍式电动机、电容起动运转式电动机和分相式电动机。按用途分类电动机按用途可分为驱动用电动机和控制用电动机。驱动用电动机又分为电动工具(包括钻孔、抛光、磨光、槽、切割、扩孔等工具)用电动机、家电(包括洗衣机、电风扇、电冰箱、空调器、录音机、录像机、影碟机、吸尘器、照相机、电风、电动剃须等)用电动机及其它通用小型机械设备(包括各种小型机床、小型机械、器械、电子仪器等)用电动机。控制用电动机又分为步进电动机和伺服电动机等。按转子的结构分类电动机按转子的结构可分为笼型感应电动机(旧标准称为鼠笼型异步电动机)和绕线转子感应电动机(旧标准称为绕线型异步电动机)。
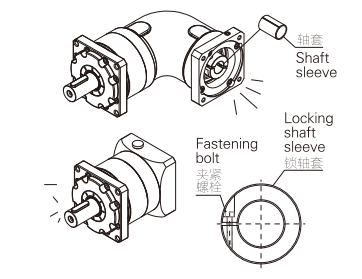
矿串轴的其他原因:
1、精密行星减速机承受正负扭矩作用时,齿厚误差、齿面不均匀磨损和过早磨损、齿背变形造成串轴。
2、齿轮螺旋角误差造成串轴。中间轴和输出轴上两半从动人字齿轮,由于实际螺旋角的误差,会使人字齿轮对中线发生变化,造成串轴。
3、精密行星减速机齿轮偏斜造成串轴。中间轴上的从动齿轮偏斜可造成串轴。齿轮是以外圆和端面进行的,而齿轮装配是以内孔的,有时内孔与外圆不同心,或者内孔与端面不垂直,就会使的齿轮与内孔中心线出现偏斜。这种偏斜的人字齿轮,其对中线所在的平面与轴线不垂直,当齿轮旋转一周时,对中线上的某一点将会发生轴向往复串动一次,迫使输入轴也轴向往复串动一次。在实际传动中,由于两半从动齿轮的偏斜程度不同,对于输入轴来讲,产生轴向串动是中间轴上两半从动齿轮不同偏斜程度综合作用的结果。此外,输出轴上的从动齿轮,由于齿轮偏斜也同样造成串动,但是由于输出轴在轴向是固定的,就迫使中间轴,进而迫使精密行星减速机输入轴串动。
使用电机时要注意的问题?
上电运行前要作如下检查:
1) 电源电压是否合适(过压很可能造成驱动模块的损坏);对于直流输入的 +/- 极性一定不能接错,驱动控制器上的电机型号或电流设定值是否合适(始时不要太大);
2) 控制信号线接牢靠,工业现场要考虑屏蔽问题(如采用双绞线);
3) 不要始时就把需要接的线全接上,只连成 基本的系统,运行良好后,再逐步连接。
4) 一定要搞清楚接地方法,还是采用浮空不接。
5) 始运行的半小时内要密切观察电机的状态,如运动是否正常,声音和温升情况,发现问题立即停机调整。
7, 步进电机启动运行时,有时动一下就不动了或原地来回动,运行时有时还会失步,是什么问题?
步进电机的转速与脉冲频率成正比,即脉冲频率越高步进电机的转速也越高,但提高了脉冲频率虽然达到了提速作用,却损失了力矩。 力矩随脉冲频率升高而下降的原因: 步进电机产生失步的两个原因就是: 一、控制脉冲频率高,此时转子的加速度小于步进电机定子旋转磁场的速度。 在步进电机供电电源设计好后,定子线圈冲电时间常数基本是固定的,设时间常数是0.02S(0.02S充电到值的63%),如果步进电机接受的脉冲周期大于0.04S(占空比为50%,频率小于25HZ),定子线圈即可以获得足够的能量产生足够带动转子的力矩。如果脉冲频率过高,比如50HZ(占空比为50%,脉冲周期大于0.02S),定子线圈获得的充电时间才0.01S,少了一半的充电时间,产生的力矩就减少了很多,致使转子跟不上定子旋转磁场的速度,每一步都落后于应该到达的平衡位置,并且距离平衡位置越来越远。积累下来的结果就造成了失步. 当然50HZ的频率太小了,本例子只是为了便于说明,随意说了一个数解决方法:1、降低脉冲频率,别认为麻烦,调试步进电机大部分是调节脉冲频率的过程 2、如果不想因降低频率而造成速度太低,那么加大步进电机供电电流 3、减轻电机的负载 二、控制脉冲频率低,此时转子的速度高于步进电机定子旋转磁场的速度。
+
-K7-19DC19 E 7-19FB19
K7-14BL14
K7-28HA22
EVB-090 -19DE19
-K7-19DE19 -K7-14BJ11 E 7-28HA22
K7-14HB16
K7-19EB16
EVB-090